出展者詳細情報埼玉大学・辻研究室 (ベンチャー&ユニバーシティエリア)



![]()
埼玉大学・辻研究室 (ベンチャー&ユニバーシティエリア)
- 住所
- 〒338-8570 埼玉県さいたま市桜区下大久保255
- ステージ
- NEXT イノベーションエリア
- 小間番号
- 4N65-02
- 出展予定製品
-
アプリケーション
その他のロボティクス、関連製品、サービス
フィットネス関連機器
その他のヘルスケア、関連製品、サービス
ヘルスケア医療関連技術
科学技術、先端技術、要素技術、研究発表
会社紹介
埼玉大学辻研究室では力覚・触覚情報を可視化した新たなコンテンツ技術を展示しています
出展製品
出展製品情報 1
その他のヘルスケア、関連製品、サービス
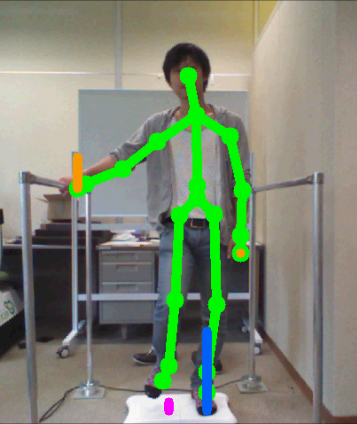
力可視化平行棒
運動器の障害によって介護や介助が必要になってしまう,あるいはそのリスクが高い状態をロコモティブシン
ドロームと呼ばれている.運動器の障害 は加齢に伴い生じるため,これを避けることはできないが,トレーニ
ングなどの適切な対処によって健康寿命の延伸は可能である.
高齢者のロコモーショントレーニングにおいて,手先や足裏が環境にどれだけ力を与えたかを可視化すること
で,身体運動を客観的に理解することが可 能になる.例えば,手で支えながら片足立ちをする際に,手先と足
裏の力を同時に可視化し,手先の力を徐々に弱めることで下肢において効果的なト レーニングが期待できる.
そこで,手先と足裏のそれぞれにかかる力を可視化する装置を開発した.装置の構成は色距離画像センサ及び力
覚センサであ る.本装置では歩行訓練で用いられる平行棒を模擬した機器を製作し,これに力覚センサを搭載
させることで手先にかかる力の推定を行う.
色距離画像センサによって全身の関節位置を取得し,力覚センサによって手先にかかる力を取得する.全身の
関節位置の時系列情報を用いることで, 全身の動力学情報を推定することが可能である.これと手先にかかる
力を用いることで足裏に働く力を推定する.力の推定には,一般化ZMPを用い る.これはヒューマノイドロボッ
トの全身協調動作などに用いられる運動指標である.一般化ZMPは足裏に働く力の代表点を意味しており,一般
化 ZMPの位置と各足首関節の位置との相対距離の比を用いることで,各足裏に働く力を推定する.力の大きさを
バーの長さとして表現することで,対象 者の全身が写った色画像と重畳させることで力情報の可視化を実現する.

出展製品情報 2
フィットネス関連機器
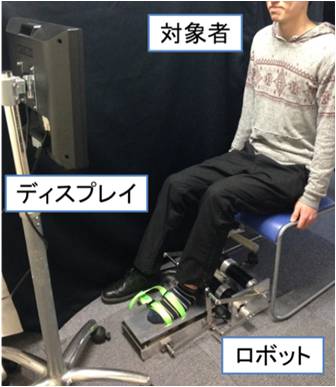
足首筋肉トレーニングロボット
本機器は遠心性収縮トレーニング(主導筋を伸張しながら鍛える方法)に特化した足首の筋力トレーニング装置です。遠心性収縮トレーニングでは指定された負荷と速度を両立する必要があります。しかし慣れない人には一定の速度を保ちながら力を調整するのが難しいのが課題でした。そこで力を可視化して提示し、人が力の大きさを視認しながら訓練する方式を導入しました。本方式の導入により効果の高い筋トレが可能になりました。
本機器はロボット技術を筋トレ装置に応用したものです。ロボット技術はまず人の運動を誘導できる、という点で有効ですが、そればかりでなく、搭載されているセンサを有効利用することで人の力を計測できる、という特長を持っています。力の可視化機能はこのロボット固有の特長を有効利用したものです。ロボット制御による誘導と力の可視化は他の機器でもそれぞれ例があります。しかし本機器はロボット制御と力の可視化機能を組み合わせることで、遠心性収縮トレーニングの課題が克服されることを世界で初めて示したものです。また、「見えない力を見える化する」というコンセプトは遠心性収縮トレーニング以外にも応用可能です。
お問い合わせ先
- 住所
- 〒338-8570 埼玉県さいたま市桜区下大久保255
- 担当部署名
- 大学院理工学研究科
- 担当者名
- 辻俊明
プレスの方お問い合わせ先
- 住所
- 〒338-8570 埼玉県さいたま市桜区下大久保255
- 担当部署名
- 大学院理工学研究科
- 担当者名
- 辻俊明