出展者詳細情報関西大学環境都市工学部ネットワーク工学研究室 (ベンチャー&ユニバーシティエリア)



![]()
関西大学環境都市工学部ネットワーク工学研究室 (ベンチャー&ユニバーシティエリア)
- 住所
- 〒564-8680 大阪府吹田市山手町3-3-35
- ステージ
- NEXT イノベーションエリア
- 小間番号
- 4N65-32
- 出展予定製品
-
ネットワーク技術
会社紹介
関西大学環境都市工学部ネットワーク工学研究室では自己組織化や群知能を用いて多様な環境に柔軟に適応する無線センサネットワークのメカニズムの研究開発を行っています.
本展示ブースでは,無線センサネットワークにおける3次元自己組織化ノード位置推定方式の概要とその有用性をデモンストレーションします.
無線センサネットワークにより取得したモノや環境の物理情報をインターネットに取り込んで新たな情報処理サービスを提供するInternet-of-Things(IoT)では,物理情報の取得位置としての無線センサノード位置は必須情報です.しかし,現在の位置推定システムはGPSなどの追加デバイスや測位設備を必要とし,さらに障害物がある多様な環境では利用困難または精度が大きく劣化します.すなわち,現在の位置推定システムはコストが高く,また利用範囲が限定的でとなります.本展示方式は,無線センサネットワークの自己組織化を用いてこの問題を解決し,追加デバイスや測位設備を必要とせず,どのような環境でも,高精度に3次元ノード位置を推定する方式であり,経済性,性能および運用性などおいて既存システムを凌駕します.
出展製品
出展製品情報 1
ネットワーク技術
無線センサネットワークのための3次元自己組織化ノード位置推定方式(SOL)
無線センサネットワークにより取得したモノや環境の物理情報をインターネットに取り込んで新たな情報処理サービスを提供するInternet-of-Things(IoT)では,物理情報の取得位置としての無線センサノード位置は必須情報です.しかし,現在の位置推定システムはGPSなどの追加デバイスや測位設備を必要とし,さらに障害物がある多様な環境では利用困難または精度が大きく劣化します.すなわち,現在の位置推定システムはコストが高く,また利用範囲が限定的でとなります.本展示の自己組織化ノード位置推定方式(SOL)は,この問題を解決し,追加デバイスや測位設備を必要とせず,どのような環境でも,高精度に3次元ノード位置を推定する方式であり,経済性,性能および運用性などおいて現在の位置推定システムを凌駕します.
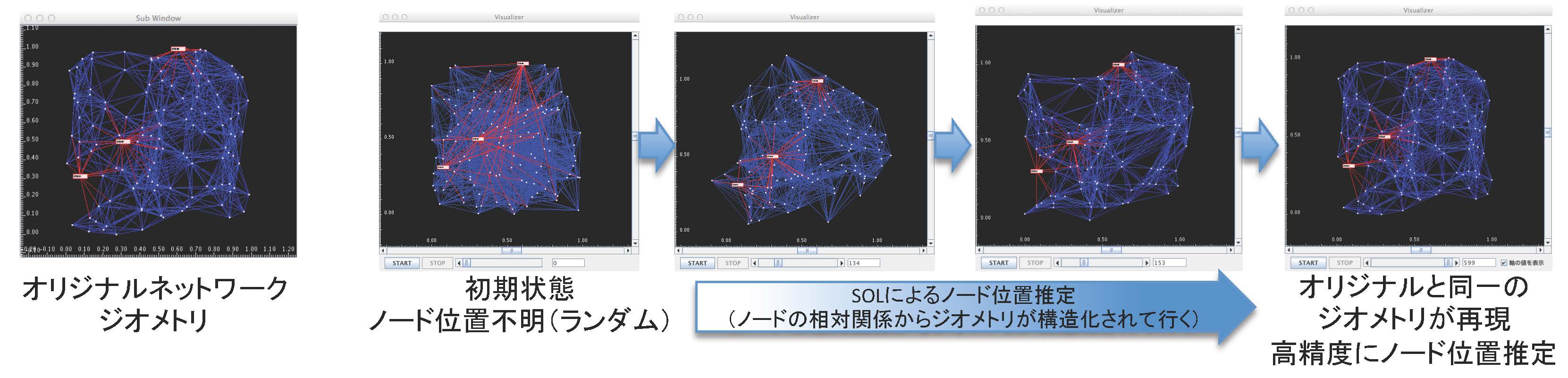
SOLは無線センサネットワークに自己組織化マップ(SOM)を適用し,全くランダムな位置情報から位置推定を開始し,隣接ノード間で自身のノード位置と近接ノードとの相対的位置関係(ホップ数)を交換し,互にその交換した位置関係に基づいて自身のノード位置を修正します.この位置交換と位置修正を繰り返して,ノード相対位置関係を系全体として構造化してネットワーク全体の形状を再現します(下図:白点は無線ノード 150ノード,四角はアンカノード 3ノード,青線/赤線は無線リンク).これにより追加デバイスや測位設備なしでノード位置を自律的に推定します.また,SOLは,多数のノード間相対関係からネットワークの形状を推定するため,その精度は耐障害性が非常に高く,ノード数が多いほど向上します.従いまして,障害物がある多種多様な環境でも極少数のアンカノードで数百のセンサノードの位置を高精度に位置推定します.
お問い合わせ先
- 住所
- 〒564-8680 大阪府吹田市山手町3-3-35
- 担当部署名
- 環境都市工学部
- 担当者名
- 滝沢 泰久
- TEL
- 06-6368-0980
- FAX
- 050-3383-4312
- メールアドレス1
- takizawa@kansai-u.ac.jp
プレスの方お問い合わせ先
- 住所
- 〒564-8680 大阪府吹田市山手町3-3-35
- 担当部署名
- 環境都市工学部
- 担当者名
- 滝沢 泰久
- TEL
- 06-6368-0980
- FAX
- 050-3383-4312
- メールアドレス1
- takizawa@kansai-u.ac.jp